自駕車技術如何運作?
自駕車技術,或稱為自動駕駛技術,是現代交通領域的重大創新之一。這項技術的核心目標是讓車輛能夠在不需要人類駕駛的情況下,自主完成從一地到另一地的行駛過程。這次我們將討論自駕車技術的運作原理,並分析其對未來交通的潛在影響。

自駕車的基本組成
要理解自駕車如何運作,我們首先需要了解其基本組成。自駕車主要由感測器、人工智慧系統和執行機制三大部分構成。
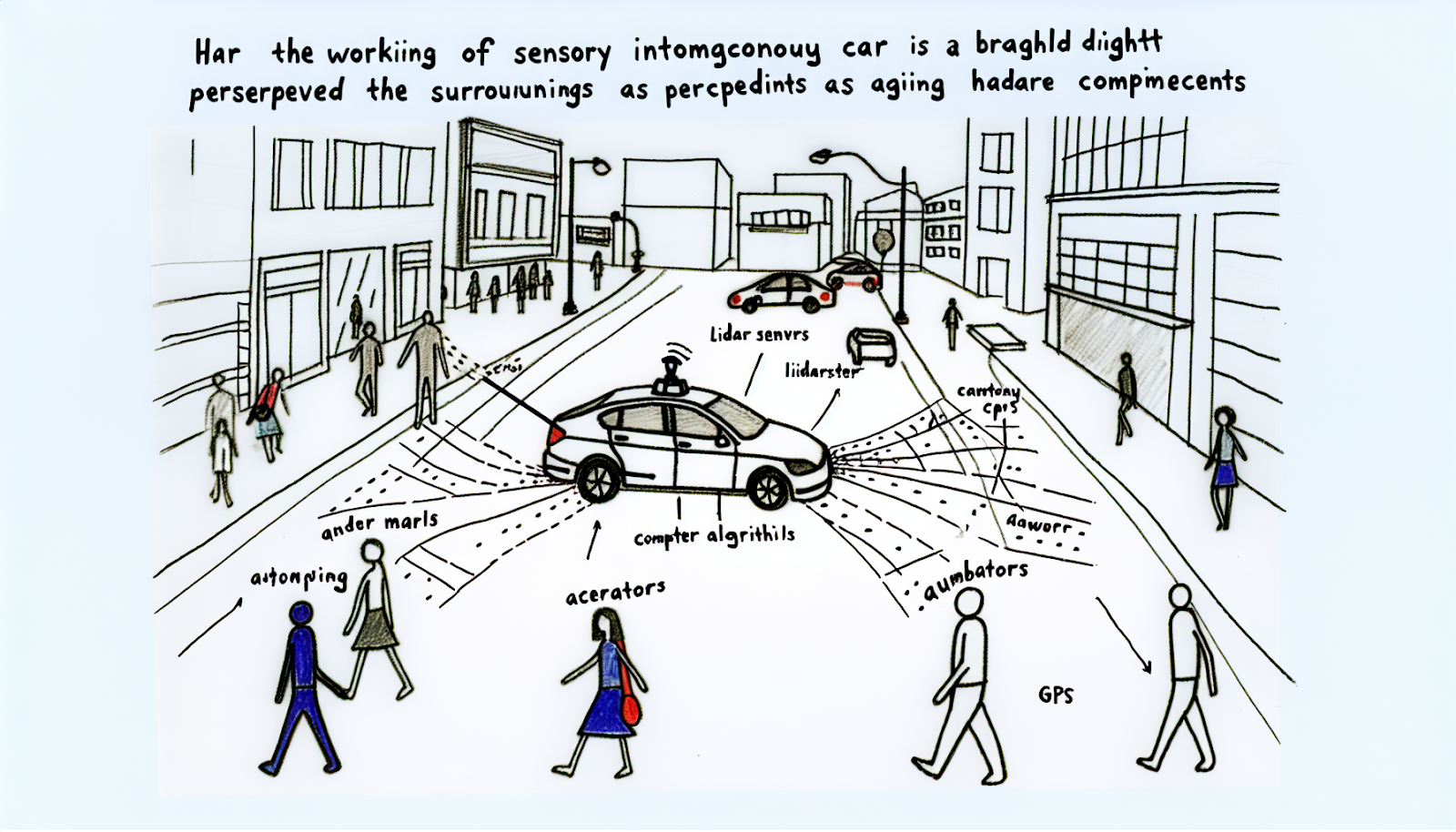
1. 感測器:自駕車配備了多種感測器,用於收集周圍環境的信息。這些感測器包括雷達、光達(LiDAR)、攝影機和超聲波感測器等。雷達可以幫助車輛探測到其他車輛和障礙物的位置及速度;光達則使用激光來繪製高精度的三維環境地圖;攝影機則負責捕捉道路上的標誌、信號燈及行人活動;而超聲波感測器則用於近距離偵測。
2. 人工智慧系統:這是自駕車的「大腦」,負責處理來自感測器的大量數據,並做出即時決策。人工智慧系統通常基於深度學習和機器學習技術,通過大量的數據訓練來識別道路情況、預測其他道路使用者的行為,並制定安全的駕駛策略。
3. 執行機制:一旦人工智慧系統做出決策,這些指令會被傳送到車輛的執行機制中,包括油門、煞車和方向盤等,從而控制車輛的運動。
自駕車技術的運作流程
自駕車技術的運作流程主要分為以下幾個步驟:
1. 感知環境:透過感測器,自駕車不斷地收集周圍環境的信息,包括道路狀況、交通信號、行人和其他車輛的位置。
2. 定位與地圖構建:自駕車利用 GPS 和內建地圖來確定自身的位置。光達和其他感測器提供的數據則用於更新和完善地圖信息。
3. 路徑規劃:根據目的地和當前位置,自駕車會計算出最佳行駛路線,考慮交通擁堵、道路封閉等因素。
4. 決策與控制:人工智慧系統根據實時數據進行分析,做出加速、減速、轉彎等具體操作指令,確保安全到達目的地。

自駕車技術的挑戰與未來展望
儘管自駕車技術已取得顯著進展,但其全面普及仍面臨諸多挑戰。首先是技術上的挑戰,例如在複雜和動態的城市環境中,自駕車需要能夠應對各種突發情況。此外,法律和倫理問題也是推廣自駕車必須解決的重要議題,例如當事故發生時,責任應該如何劃分。
然而,自駕車技術的前景依然令人期待。隨著技術的不斷成熟,自駕車有望大幅提高交通安全性,降低事故率。同時,自駕車也可能改變我們的生活方式,使得通勤變得更加舒適和高效。
總結來說,自駕車技術是一項集成了多種先進科技的複雜系統,其成功運作依賴於感測器、人工智慧和執行機制的協同工作。儘管面臨挑戰,但其潛在的社會效益不可忽視。隨著技術的不斷演進,我們有理由相信,自駕車將在未來成為日常生活的一部分,帶來更安全、更便捷的出行體驗。